1. 系統資訊與影像處理實作
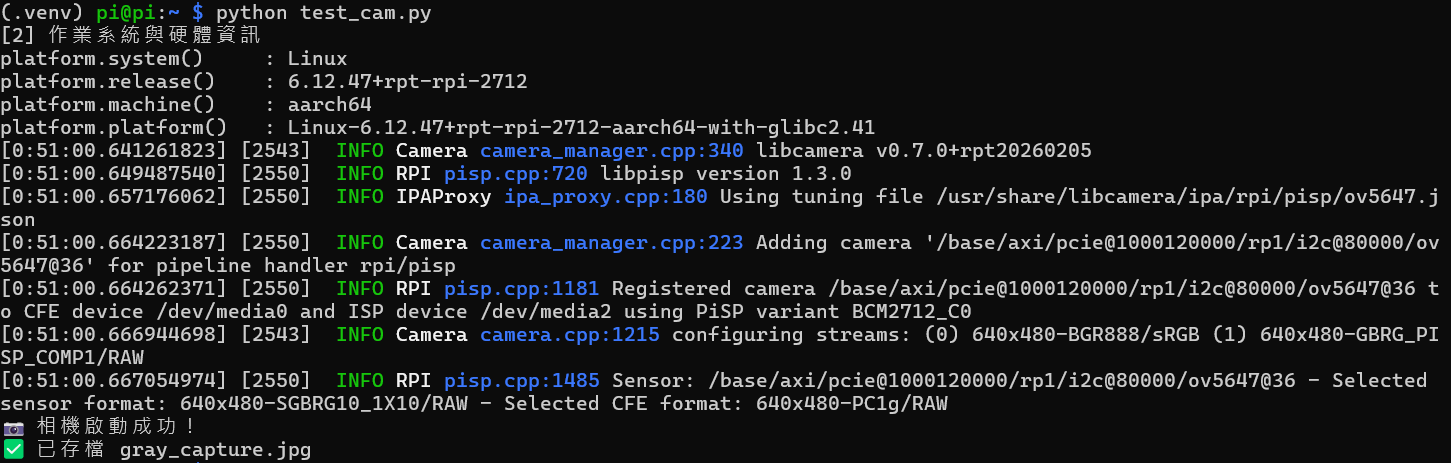
- 系統環境:透過 platform 模組確認核心版本為 6.12.47+rpt-rpi-2712,系統架構為 aarch64。
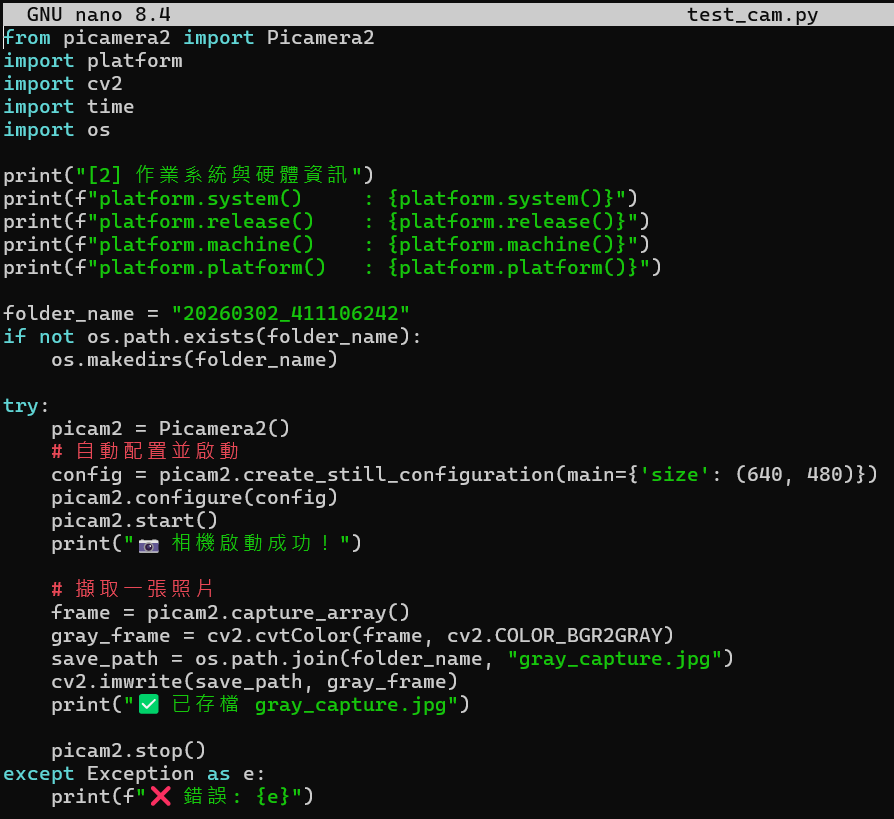
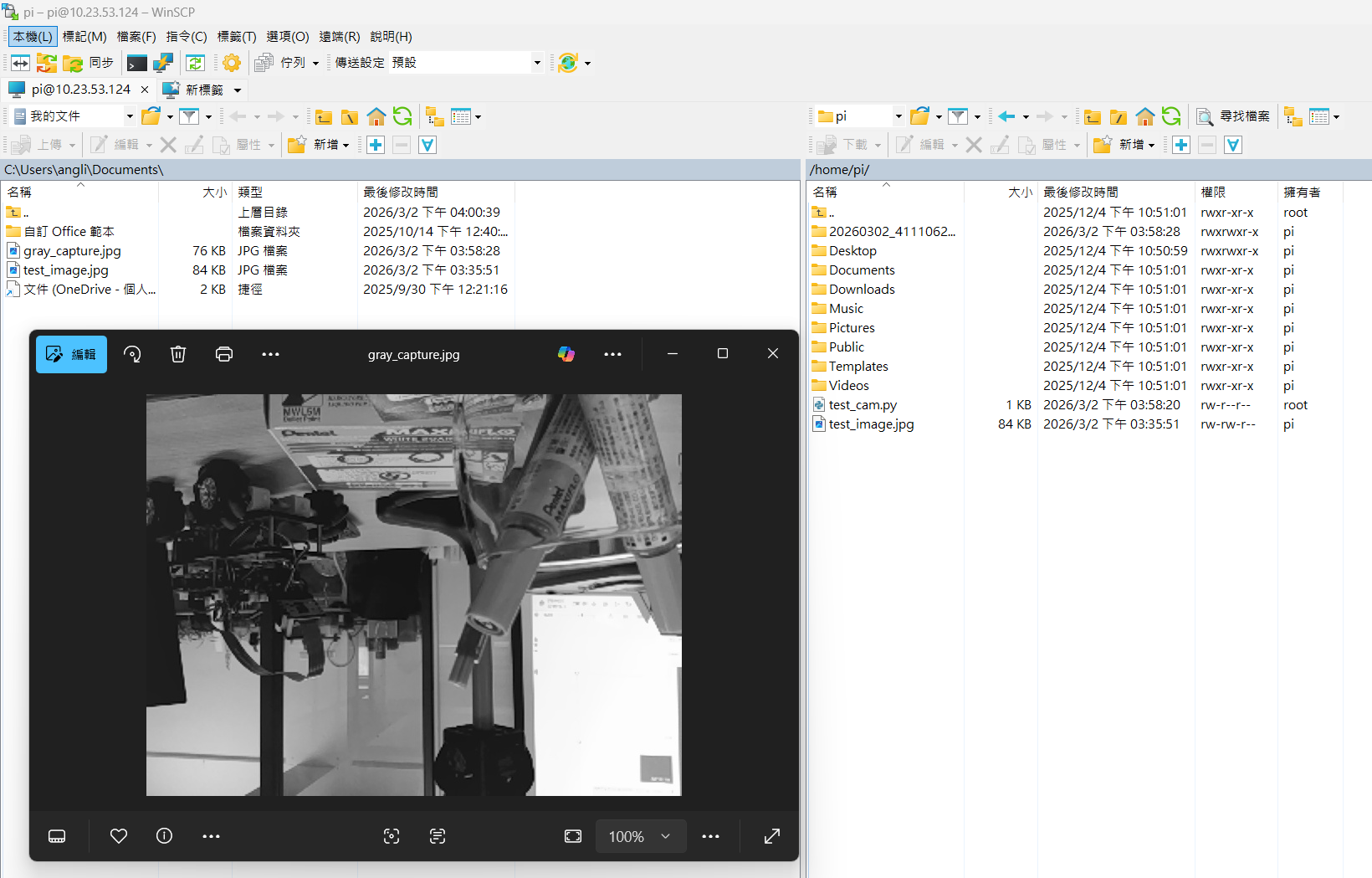
- 自動化檔案管理:程式啟動後自動建立以學號命名的資料夾 20260302_411106242。
- 相機擷取與處理:
- 使用 Picamera2 模組擷取 640 x 480 解析度之影像。
- 結合 OpenCV (cv2.cvtColor) 將原始彩色畫面轉換為灰階格式。
- 實作成果:成功於指定路徑生成灰階影像檔案 gray_capture.jpg。